
Tenglong Huang (黄腾龙) received Ph.D. degree in Control Science and Engineering from Harbin Institute of Technology (哈尔滨工业大学) under the supervision of Prof. Huijun Gao (师从高会军教授).
I am a member of the Institute of Electrical and Electronics Engineers (IEEE), the Chinese Association for Artificial Intelligence (CAAI), the Chinese Association of Automation (CAA), the board of directors of the Shaanxi Society of Agricultural Engineering and a technical committee member on Unmanned Systems of the Chinese Institute of Command and Control (CICC), CAA technical committee member on Fully Actuated System Theory and Applications.
Meanwhile, I am an active reviewer of IEEE Transactions on Automation Science and Engineering, IEEE Transactions on Transportation Electrification, IEEE/ASME Transactions on Mechatronics, IEEE Transactions on Industrial Informatics, IEEE/CAA Journal of Automatica Sinica, IEEE Transactions on Systems, Man, and Cybernetics: Systems, IEEE Transactions on Intelligent Transportation Systems, IEEE Transactions on Intelligent Vehicles, Neurocomputing, Applied Intelligence, Circuits, Systems, and Signal Processing, Complex & Intelligent Systems, Journal of Intelligent & Robotic Systems, Scientific Reports, Discover Computing, Computational and Mathematical Methods, Measurement and Control, Machines, Robotics (机器人), Control and Decision (控制与决策), Control Theory and Applications (控制理论与应用), Information and Control (信息与控制), Journal of Harbin Institute of Technology (哈尔滨工业大学学报), and other journals.
My research interests include intelligent vehicles, mobile robots, robotic manipulators, intelligent agriculture, and related research topics on nonlinear control, intelligent control, motion planning, fault-tolerant control, etc.
If you are seeking any form of academic cooperation, please feel free to contact me at huangtenglong@hotmail.com (or WeChat: 15893529535).
📝 Publications
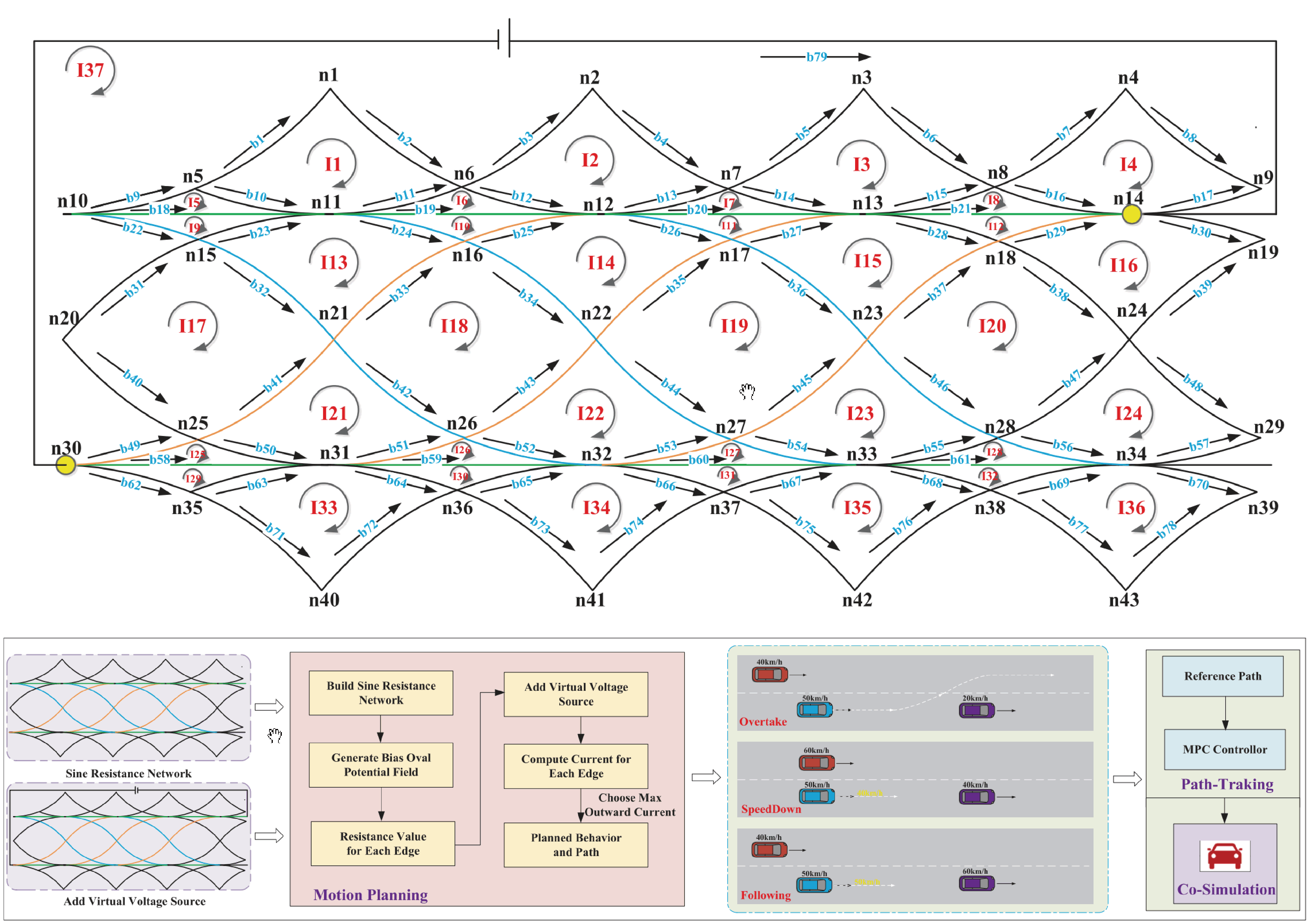
published in IEEE Transactions on Transportation Electrification
Tenglong Huang, Huihui Pan*, Weichao Sun, Huijun Gao* (*Corresponding Author)
- A new sine grid is presented for the first time to construct a novel sine resistance network (SRN). The proposed novel sine grid can avoid curvature discontinuity. Thus, the path smoothness and overall performance are improved significantly.
- The bias oval artificial potential field (BOAPF) is generated by taking the velocity information into account. The modified APF method can cope with the dynamic environment.
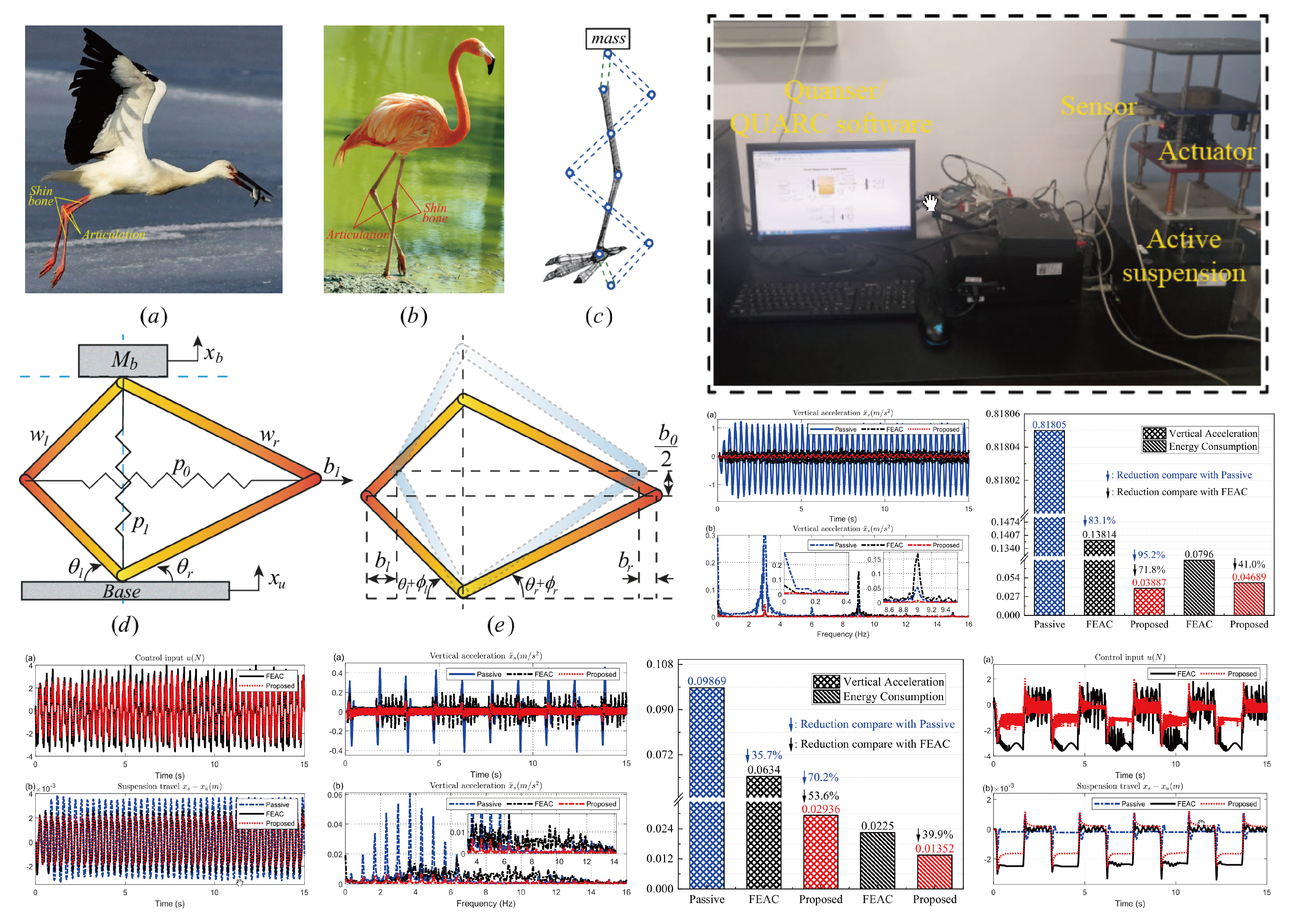
Approximation-Free Prespecified Time Bionic Reliable Control for Vehicle Suspension
published in IEEE Transactions on Automation Science and Engineering
Tenglong Huang, Jue Wang, Huihui Pan*
- A pre-specified time controller is designed that can make the steady-state responses of error signals converge to a neighborhood of 0 over a pre-specified finite time interval.
- By introducing time delay information, the designed control scheme is model-free and approximation-free. Actuator faults can be effectively compensated and handled to enhance reliability.
- Inspired by animal bionic structures, asymmetric X-type bio-inspired dynamics are embedded into this controller, which further reduces energy consumption.
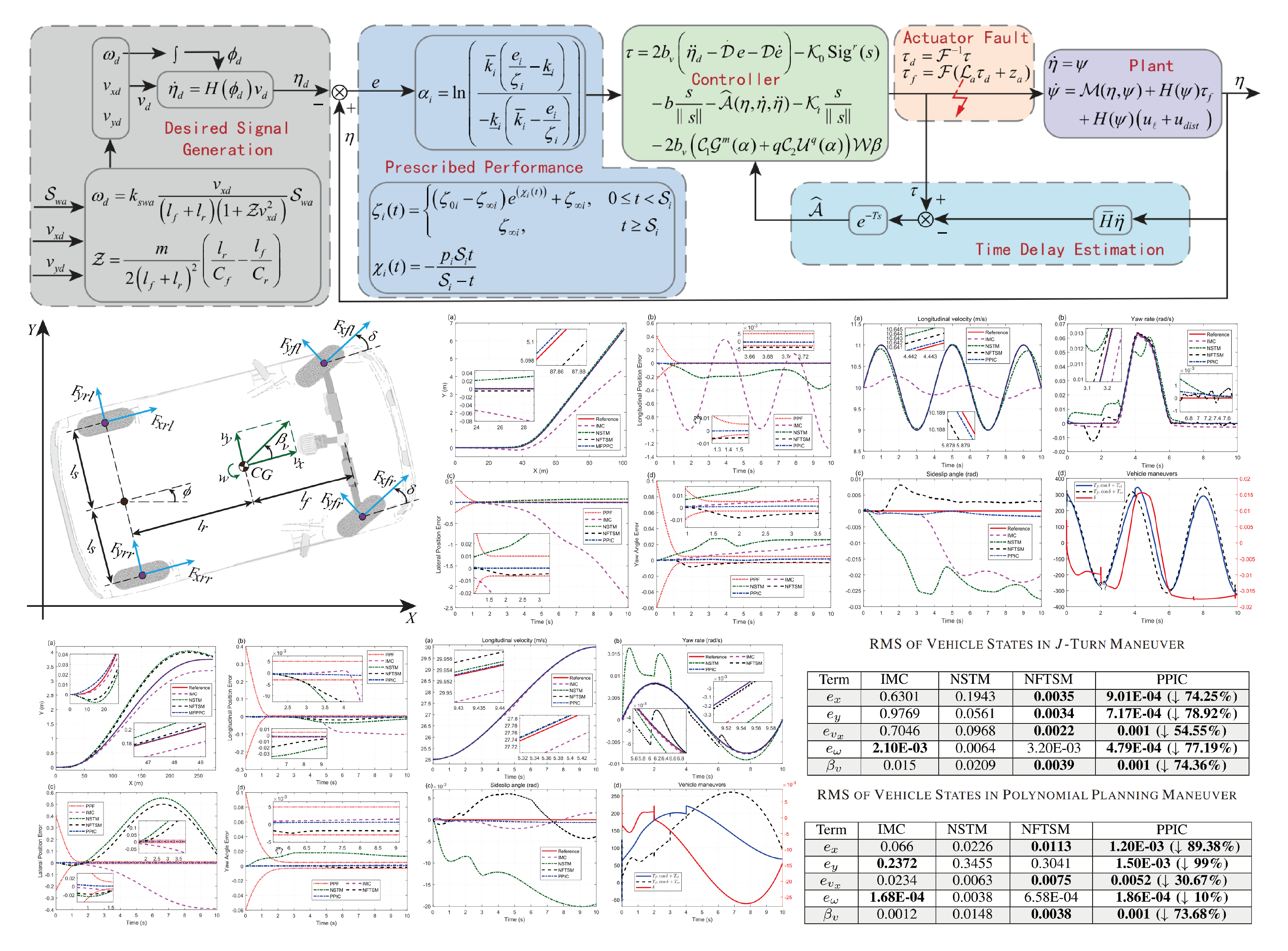
published in IEEE Transactions on Transportation Electrification
Tenglong Huang, Jue Wang, Huihui Pan*, Weichao Sun
- A fixed-time integrated motion control scheme with time-varying longitudinal velocity is presented to address the interactions and coupling between lateral and longitudinal dynamics.
- The desired trajectory and dynamics can be tracked accurately. The tracking errors can enter the prescribed steady-state precision region in a fixed time, and asymptotic convergence is ensured.
- The negative impacts of the unknown external disturbance and actuator faults are eliminated. Note that no additional boundness information and approximate tools are required.
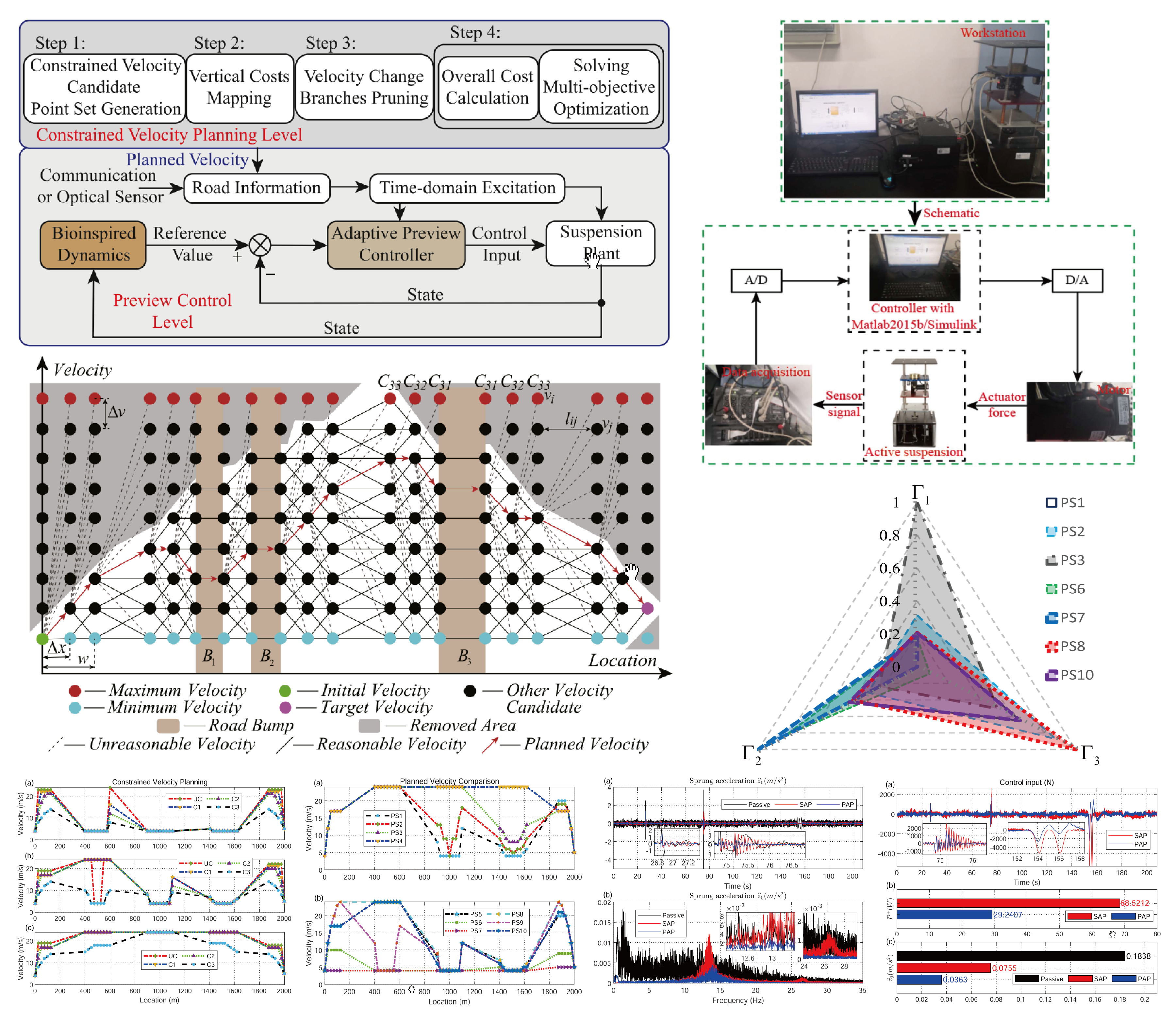
published in IEEE Transactions on Intelligent Vehicles
Tenglong Huang, Jue Wang, Huihui Pan*
- A constrained velocity planning algorithm is proposed to balance the vertical ride comfort, longitudinal comfort, and passage time.
- Based on the planned velocity and road information, this article presents a preview controller employing generated road excitation from an adaptive control perspective.
- To the authors’ knowledge, this study is the first to propose a nonlinear adaptive bionic preview suspension control and planning framework.
- Animal limb-inspired bio-inspired dynamics are introduced as reference trajectories to take advantage of the beneficial nonlinearities, achieving significant energy savings.
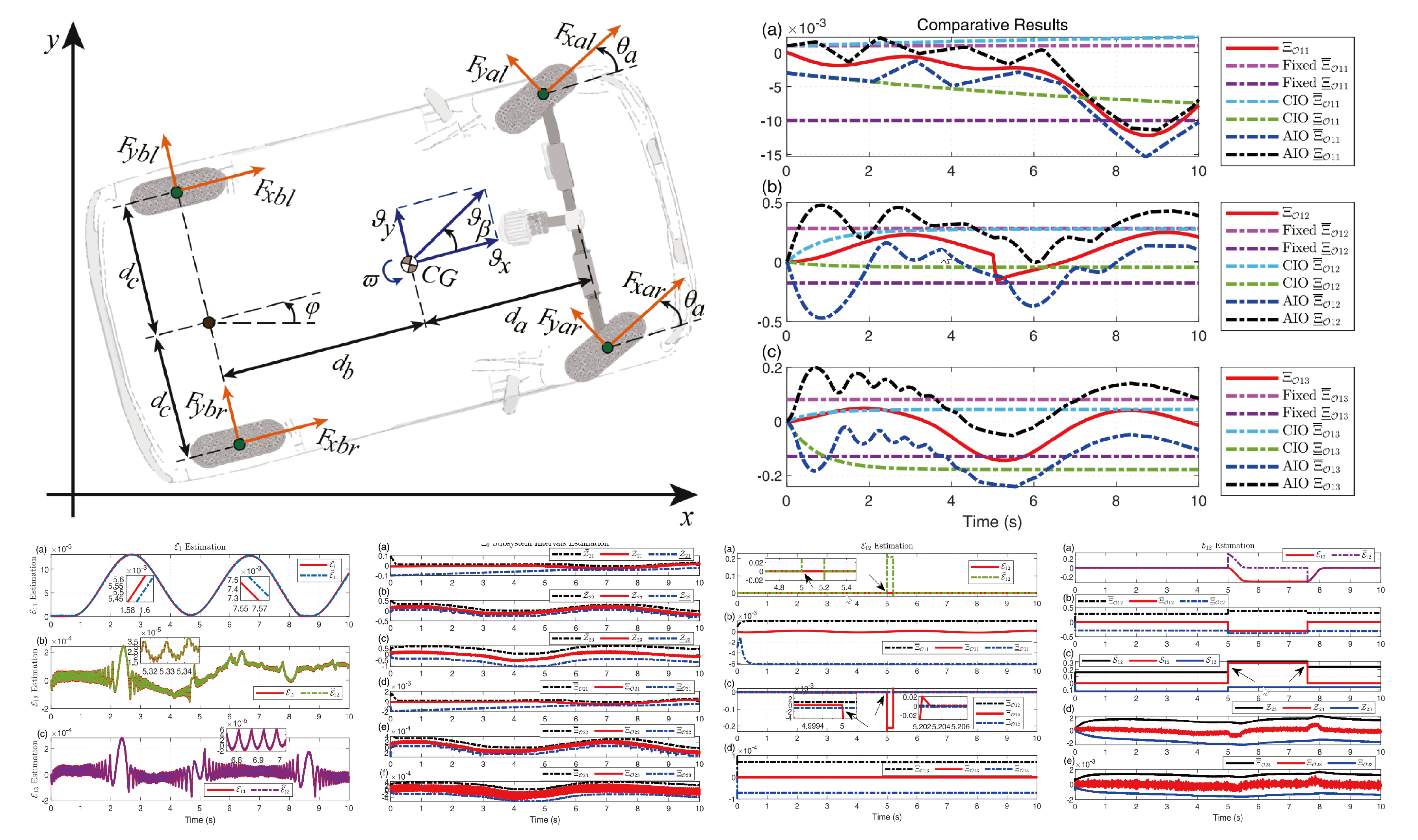
A Sensor Fault Detection, Isolation, and Estimation Method for Intelligent Vehicles
published in Control Engineering Practice
Tenglong Huang, Huihui Pan*, Weichao Sun
- A state estimation method based on the Luenberger observer is constructed for lateral-longitudinal coupled dynamical systems, which allows for efficient state estimation.
- The interval observers without dependence on the prior knowledge of perturbation and uncertainties are constructed. The proposed interval observers can be adapted to estimate corresponding fault interval bounds effectively, thereby enabling sensor fault detection and isolation.
- A modification to the interval observer structure is proposed and utilized to estimate the occurred sensor fault corresponding to the faulty sensor. This modified interval observer allows for effective adaptive estimation of the upper and lower boundaries of the sensor fault interval.
- Integrating Actor–Critic Reinforcement Learning With Evolutionary Algorithm for Multimodal Multiobjective Optimization, Kaili Xiang, Tenglong Huang*, Lei Yang*, Jie Lin, published in IEEE Transactions on Neural Networks and Learning Systems
- Adaptive Finite-Time Fuzzy Prescribed Performance Fault-Tolerant Control for Uncertain Active Suspensions with Actuator Nonlinear Characteristics, Yilan Lu, Tenglong Huang*, Jinhua Zhang, Xin Wang, Xuejie Guo, published in Journal of Sound and Vibration
- Adaptive MPC Control for In-Wheel-Motor-Drive Electric Vehicles with Semi-Active Suspension Based on Binocular Vision Road Identification, Boqiang Zhang, Zongjing Li, Haohan Zhao*, Xun Zhang, Tenglong Huang, Yuchen Wang, Yahui Zhang, published in IEEE Transactions on Transportation Electrification
- A Safe Motion Planning and Reliable Control Framework for Autonomous Vehicles, Huihui Pan*, Mao Luo, Jue Wang, Tenglong Huang, Weichao Sun, published in IEEE Transactions on Intelligent Vehicles
- Path Planning and Fault-tolerant Control Based on Resistance Network for Autonomous Driving, Tenglong Huang, Huihui Pan*, Chi Zhang, Weichao Sun, published in 4th CAA International Conference on Vehicular Control and Intelligence (CVCI 2020)
🎖 Honors and Awards
- 2017.08 World Robot Contest Fighting Robot Competition. Second Place (亚军-全国一等奖).
📖 Educations
- 2019.09 - 2024.05, Harbin Institute of Technology, College of Astronautics, Control Science and Engineering, Doctor of Philosophy under the Supervision of Prof. Huijun Gao (师从高会军教授).
- 2015.09 - 2019.06, Henan University of Technology, College of Electrical Engineering, Automation, Bachelor of Engineering under the Supervision of Prof. Jingjing Yan (师从闫晶晶教授).
🎯 Works
- 2024.10 - now, Northwest A&F University, College of Mechanical and Electronic Engineering, Associate Professor.
🧑🎨 Services
- 2025.11 - now, Scientific Reports, Editorial Board Member.
- 2025.08 - now, Biomimetic Intelligence and Robotics, Early Career Editorial Board Member.
- 2025.04 - now, Drones, Early Career Editorial Board Member.
- 2025.01 - now, Journal of Xi’an Jiaotong University, Early Career Editorial Board Member.
- 2025.04 - now, Journal of Artificial Intelligence and Control Systems, Young Editorial Board Member.
- 2025.01 - now, Journal of Nanjing University of Science and Technology, Early Career Editorial Board Member.
- 2025.05 - now, Unmanned Systems Technology, Early Career Editorial Board Member.
- 2025.12 - now, Digital Twins and Applications, Young Editorial Board Member.
- 2025.01 - now, Applied Artificial Intelligence Research, Young Editorial Board Member.
- 2025.07 - now, Applied Mathematics and Statistics, Young Editorial Board Member.
- 2025.05, Energies, Guest Editor.
- 2025.10, Sensors, Energies, Applied Sciences, Electronics, Technologies, Data, Modelling, Topic Editor.
- 2024.11 - now, Computer Science and Technology, Editorial Board Member.
- 2024.11 - now, Automation, Control and Intelligent Systems, Editorial Board Member.
- 2025.10, 2025 8th International Conference on Robotics, Control and Automation Engineering, Special Session Chair.
- 2025.10, The 5th International Conference on Robotics, Automation and Intelligent Control, Workshop Chair.
- 2025.11, 2025 10th Asia-Pacific Conference on Intelligent Robot Systems, Special Session Chair.
- 2025.12, 2025 3rd International Conference on Electric Vehicle and Vehicle Engineering, Special Session Chair.
- 2026.01, 2026 International Conference on Robotics, Automation and Intelligent Transportation Systems, Workshop Chair.
- 2026.02, 2026 10th International Conference on Artificial Intelligence, Automation and Control Technologies, Special Session Chair.
💬 Invited Talks
- 2025.11, 2025 12th International Forum on Electrical Engineering and Automation, Invited Speaker.